Introducción
La siguiente ecuación muestra que en el espectro de frecuencia de la respuesta, 



– – – – (1)
Esto se ilustra en la figura 1.
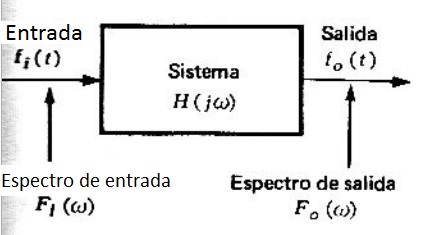
Se observa que
El filtro ideal para frecuencias bajas se define como un sistema para el cual la función del sistema,

donde a 
Problema resuelto
Problema 1. Hallar 
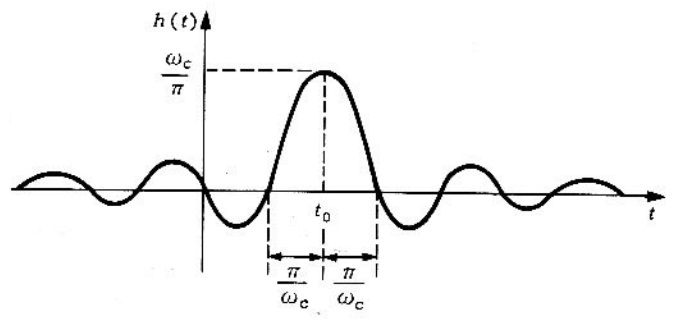
Solución. La figura 2 muestra las características de un filtro ideal para frecuencias bajas.

La respuesta al impulso unitario,
![\displaystyle h(t) = \mathcal{F}^{-1}[H(j\omega)]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+h%28t%29+%3D+%5Cmathcal%7BF%7D%5E%7B-1%7D%5BH%28j%5Comega%29%5D&bg=ffffff&fg=192930&s=0&c=20201002)




![\displaystyle h(t) = \frac{1}{2\pi} \int_{-\omega_c}^{\omega_c}{e^{j\omega (t - t_0)} \, d\omega} = \frac{1}{2\pi} \left[\frac{1}{j(t-t_0)} e^{j\omega (t - t_0)} + C \right]_{-\omega_c}^{\omega_c}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+h%28t%29+%3D+%5Cfrac%7B1%7D%7B2%5Cpi%7D+%5Cint_%7B-%5Comega_c%7D%5E%7B%5Comega_c%7D%7Be%5E%7Bj%5Comega+%28t+-+t_0%29%7D+%5C%2C+d%5Comega%7D+%3D+%5Cfrac%7B1%7D%7B2%5Cpi%7D+%5Cleft%5B%5Cfrac%7B1%7D%7Bj%28t-t_0%29%7D%C2%A0e%5E%7Bj%5Comega+%28t+-+t_0%29%7D+%2B+C+%5Cright%5D_%7B-%5Comega_c%7D%5E%7B%5Comega_c%7D&bg=ffffff&fg=192930&s=0&c=20201002)
![\displaystyle h(t) = \frac{1}{2\pi} \left[\frac{1}{j(t-t_0)} e^{j\omega_c (t - t_0)} - \frac{1}{j(t-t_0)} e^{-j\omega_c (t - t_0)} \right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+h%28t%29+%3D+%5Cfrac%7B1%7D%7B2%5Cpi%7D+%5Cleft%5B%5Cfrac%7B1%7D%7Bj%28t-t_0%29%7D%C2%A0e%5E%7Bj%5Comega_c+%28t+-+t_0%29%7D+-%C2%A0%5Cfrac%7B1%7D%7Bj%28t-t_0%29%7D%C2%A0e%5E%7B-j%5Comega_c+%28t+-+t_0%29%7D+%5Cright%5D&bg=ffffff&fg=192930&s=0&c=20201002)
![\displaystyle h(t) = \frac{1}{j2\pi(t-t_0)} \left[e^{j\omega_c (t - t_0)} -e^{-j\omega_c (t - t_0)} \right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+h%28t%29+%3D+%5Cfrac%7B1%7D%7Bj2%5Cpi%28t-t_0%29%7D+%5Cleft%5Be%5E%7Bj%5Comega_c+%28t+-+t_0%29%7D+-e%5E%7B-j%5Comega_c+%28t+-+t_0%29%7D+%5Cright%5D&bg=ffffff&fg=192930&s=0&c=20201002)
![\displaystyle h(t) = \frac{1}{\pi(t-t_0)} \left[\frac{e^{j\omega_c (t - t_0)} -e^{-j\omega_c (t - t_0)}}{j2} \right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+h%28t%29+%3D+%5Cfrac%7B1%7D%7B%5Cpi%28t-t_0%29%7D+%5Cleft%5B%5Cfrac%7Be%5E%7Bj%5Comega_c+%28t+-+t_0%29%7D+-e%5E%7B-j%5Comega_c+%28t+-+t_0%29%7D%7D%7Bj2%7D+%5Cright%5D&bg=ffffff&fg=192930&s=0&c=20201002)



Este resultado se puede graficar. Esto se observa en la figura 3, de la cual se dan las siguientes conclusiones:
- La entrada aplicada es distorsionada por el sistema, debido al hecho de que el filtro transmite sólo una limitada banda de frecuencias.
- El valor pico de la respuesta
es proporcional a la frecuencia de corte
; se puede hacer referencia a esta cantidad, como la duración efectiva del pulso de salida,
. Se observa que cuando
(es decir, cuando el filtro permite el paso de todas las frecuencias),
, y el pico de la respuesta
; en otros términos la respuesta se aproxima a un impulso, tal como debe ser.
- También se observa que la respuesta no es cero antes de
, es decir, antes de se aplique la entrada. Esta es la característica de un sistema físicamente no realizable. Los filtros ideales no son físicamente realizables, y por consiguiente, no son necesariamente sistemas casuales.
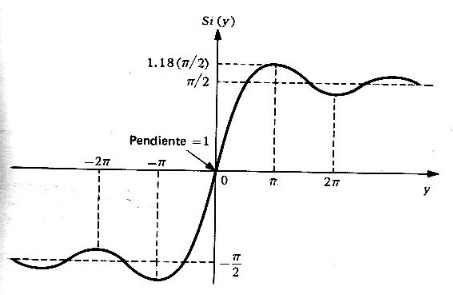
Función seno – integral
La función seno – integral (del límite superior 

Problema resuelto
Problema 2.
- (a) Evaluar la función seno-integral.
- (b) Hallar
, la respuesta al escalón unitario de un filtro ideal para frecuencias.
Solución (a). Dado que 

Según la definición, cuando 

Dado que

Entonces, si

Cuando 

Y cuando 

En la figura 4 se muestra una gráfica de 
Solución (b). Recordando que la respuesta al impulso unitario, de un filtro ideal para frecuencias bajas fue de

lo cual, cambiando la variable 


La respuesta al escalón unitario, se puede obtener de



Remplazando la variable 




Mediante la función seno-integral, la ecuación se puede expresar como
![\displaystyle a(t) = \frac{1}{\pi} \cdot \frac{\pi}{2} + \frac{1}{\pi} \cdot \text{Si} \left[ \omega_c (t - t_0) \right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+a%28t%29+%3D+%5Cfrac%7B1%7D%7B%5Cpi%7D+%5Ccdot+%5Cfrac%7B%5Cpi%7D%7B2%7D+%2B+%5Cfrac%7B1%7D%7B%5Cpi%7D+%5Ccdot+%5Ctext%7BSi%7D+%5Cleft%5B+%5Comega_c+%28t+-+t_0%29+%5Cright%5D&bg=ffffff&fg=192930&s=0&c=20201002)
![\displaystyle \therefore a(t) = \frac{1}{2} + \frac{1}{\pi} \text{Si} \left[ \omega_c (t - t_0) \right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Ctherefore+a%28t%29+%3D+%5Cfrac%7B1%7D%7B2%7D+%2B+%5Cfrac%7B1%7D%7B%5Cpi%7D+%5Ctext%7BSi%7D+%5Cleft%5B+%5Comega_c+%28t+-+t_0%29+%5Cright%5D&bg=ffffff&fg=192930&s=0&c=20201002)
En la figura 5 se muestra la gráfica de
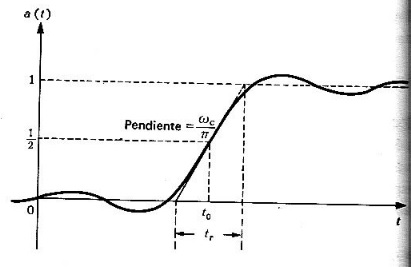
En el resultado anterior se observa lo siguiente:
- se observa nuevamente la distorsión debida a la banda limitada del filtro;
- se observa nuevamente que la respuesta no es cero antes de
- utilizando
, se observa que cuando
![\displaystyle a(t) = \frac{1}{2} + \frac{1}{\pi} \text{Si} \left[ \omega_c (t - t_0) \right] = \frac{1}{2} - \frac{1}{2} =0 \quad \mbox{para} \quad t<t_0](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+a%28t%29+%3D+%5Cfrac%7B1%7D%7B2%7D+%2B+%5Cfrac%7B1%7D%7B%5Cpi%7D+%5Ctext%7BSi%7D+%5Cleft%5B+%5Comega_c+%28t+-+t_0%29+%5Cright%5D+%3D+%5Cfrac%7B1%7D%7B2%7D+-+%5Cfrac%7B1%7D%7B2%7D+%3D0+%5Cquad+%5Cmbox%7Bpara%7D+%5Cquad+t%3Ct_0&bg=ffffff&fg=192930&s=0&c=20201002)
![\displaystyle a(t) = \frac{1}{2} + \frac{1}{\pi} \text{Si} \left[ \omega_c (t - t_0) \right] = \frac{1}{2} + \frac{1}{2} = 1 \quad \mbox{para} \quad t>t_0](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+a%28t%29+%3D+%5Cfrac%7B1%7D%7B2%7D+%2B+%5Cfrac%7B1%7D%7B%5Cpi%7D+%5Ctext%7BSi%7D+%5Cleft%5B+%5Comega_c+%28t+-+t_0%29+%5Cright%5D+%3D+%5Cfrac%7B1%7D%7B2%7D+%2B+%5Cfrac%7B1%7D%7B2%7D+%3D+1+%5Cquad+%5Cmbox%7Bpara%7D+%5Cquad+t%3Et_0&bg=ffffff&fg=192930&s=0&c=20201002)
y la respuesta se convierte en 
4. la entrada, un escalón unitario, tiene un súbito ascenso mientras la respuesta muestra un ascenso gradual.
Si se define el tiempo de ascenso de la respuesta 



![\displaystyle \left. \frac{d}{dt}[a(t)] \right|_{t=t_0} = \frac{1}{t_r} = \frac{\omega_c}{\pi}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cleft.+%5Cfrac%7Bd%7D%7Bdt%7D%5Ba%28t%29%5D+%5Cright%7C_%7Bt%3Dt_0%7D+%3D+%5Cfrac%7B1%7D%7Bt_r%7D+%3D+%5Cfrac%7B%5Comega_c%7D%7B%5Cpi%7D&bg=ffffff&fg=192930&s=0&c=20201002)
– – – – (2)
Por tanto,

– – – – (3)
o

– – – – (4)
El tiempo de ascenso (o tiempo de súbida)

