Introducción
Estos circuitos contienen sólo un único elemento de almancenamiento (capacitor o inductor) y ésa se describe mediante una ecuación diferencial de primer orden. Su ánalisis describe el comportamiento de un circuito como función del tiempo después de que ocurre un cambio súbito en la red debido a la apertura o cierre de interruptores. Debido a la presencia del elemento de almacenamiento, la respuesta del circuito a un cambio súbito atravesará por un periodo de transición antes de estabilizarse en un valor de estado estable.
Un parámetro importante en el análisis transitorio es la constante de tiempo del circuito, conocido como τ. Este parámetro revela que tan rápido respoderá el circuito a los cambios.
Forma general de las ecuaciones de respuesta
La solución general de una ecuación diferencial de primer orden
Sea

(1)
la forma general de representar una ecuación diferencial de primer orden.
Un teorema fundamental de las ecuaciones diferenciales afirma que si 


(2)
Entonces

(3)
es la solución de la ecuación (1) original. El término 

Para el caso de que 


(4)
(5)
Resolviendo la ecuación (4) utilizando la siguiente ecuación,

(6)
donde 








(7)
Para la ecuación (5)






(8)
Por tanto, una solución de la ecuación (1) es



(9)
donde la constante 

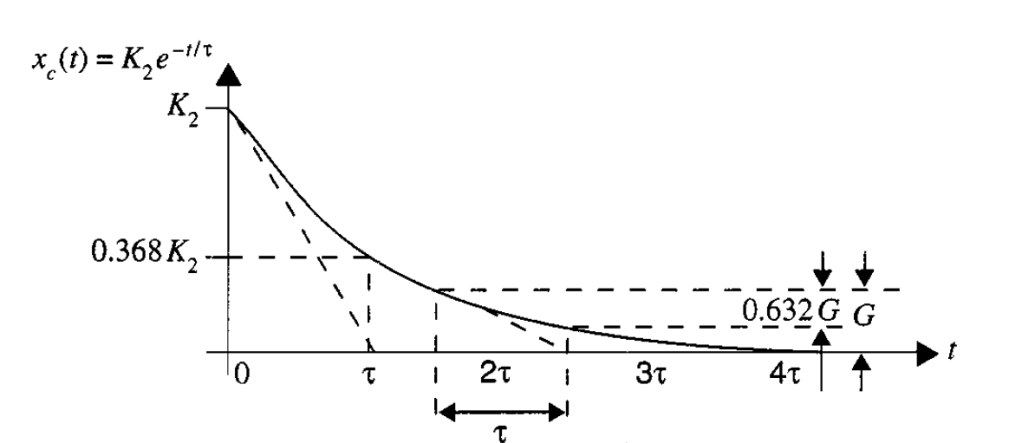
La ecuación (9) puede expresarse en general de la forma

(10).
donde el comportamiento de algunos los elementos de la ecuación (10) ocurren de la siguiente manera:
- El término
se denomina solución de estado estable: el valor de la variable
cuando el segundo término se hace insignificante.
es la constante de tiempo del circuito. En la ecuación (10) se observa que el segundo término es una exponencial decreciente que tiene un valor, si
, de
y una valor de cero para
. La razón por la cual decrece esta exponencial es porque está determinada por el valor de esa constante de tiempo
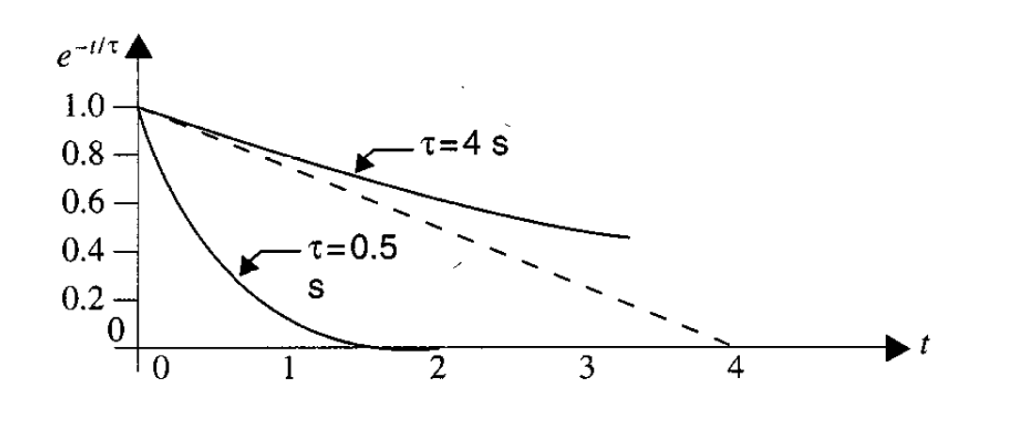
El comportamiento de la respuesta natural
Del segundo termino de la ecuación (10)

tiene la siguiente representación gráfica (figura 1). Se observa el decrecimiento de la exponencial determinada por la constante de tiempo, τ. El valor de 



Una propiedad interesante de la función exponencial que se observa en la figura 1 es que la pendiente inicial de la curva intersecta el eje de tiempo a un valor de