Mapeo entre el plano s y el plano z. Control digital.
Introducción
En vista de que las variables complejas y están relacionadas mediante , la localización de los polos y los ceros en el plano está relacionado con la localización de los polos y ceros del plano . Por lo tanto, la estabilidad del sistema en lazo cerrado en tiempo discreto lineal e invariante con el tiempo puede determinarse con base en las posiciones de los polos de la función de transferencia pulso en lazo cerrado. Debe observarse que el comportamiento dinámico del sistema de control en tiempo discreto depende del período de muestreo .
Correspondencia del semiplano izquierdo del plano s hacia el plano z
Cuando en el proceso se incorpora un muestreo por impulsos, las variables complejas y quedan relacionadas mediante la ecuación:
Esto significa que un polo en el plano s puede quedar localizado en el plano mediante la transformación . Dado que la variable compleja está formada de una parte real σ y una parte imaginara ω, tenemos:
Y
En esta última ecuación se observa que los polos y los ceros en el plano , donde las frecuencias difieren en múltiplos enteros de la frecuencia de muestreo , corresponden a las mismas localizaciones en el plano . Esto significa que por cada valor de existirá un número infinito de valores .
Dado que σ es negativo en el semiplano izquierdo del plano , eso corresponde a:
El eje en el plano corresponde a .
Franja primaria y franjas complementarias
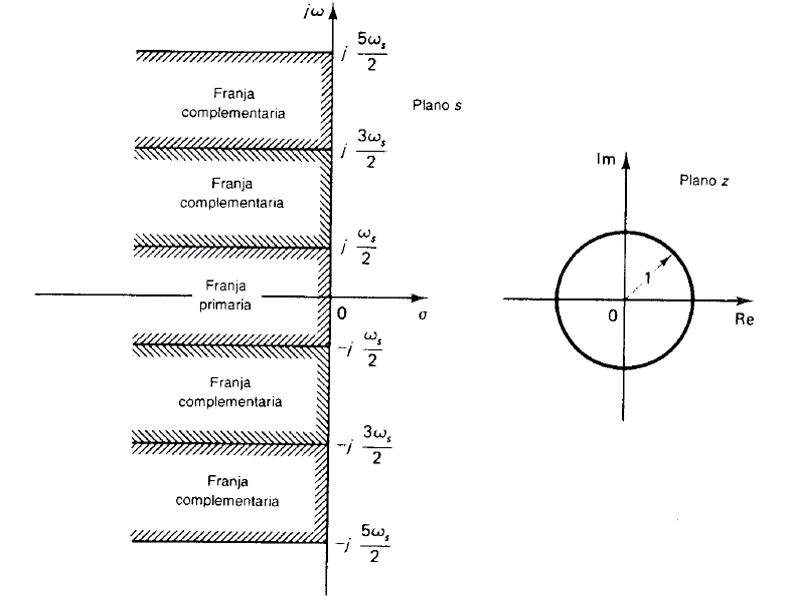
En vista de que , el ángulo de varía desde hasta conforme varía desde hasta . Se toma en punto representativo en el eje del plano . Conforme este punto se mueve sobre el eje desde hasta , siendo la frecuencia de muestreo, se tiene que , y varía desde hasta , en dirección antihoraria en el plano . Conforme el punto representativo se mueve desde hasta , sobre el eje , el punto correspondiente en el plano traza un círculo unitario en sentido antihorario. Por lo tanto, conforme en el punto en el plano se mueve en el plano desde hasta , se dibuja el círculo unitario en el plano un número infinito de veces.
Figura 1. Franjas periódicas en el plano s y región correspondiente en el plano z
Esto implica que el semiplano izquierdo del plano s puede dividirse con un número infinito de franjas periódicas, tal como se muestra en la figura. La franja primaria se extiende desde hasta . La franja complementaria se extiende desde hasta y posteriores.
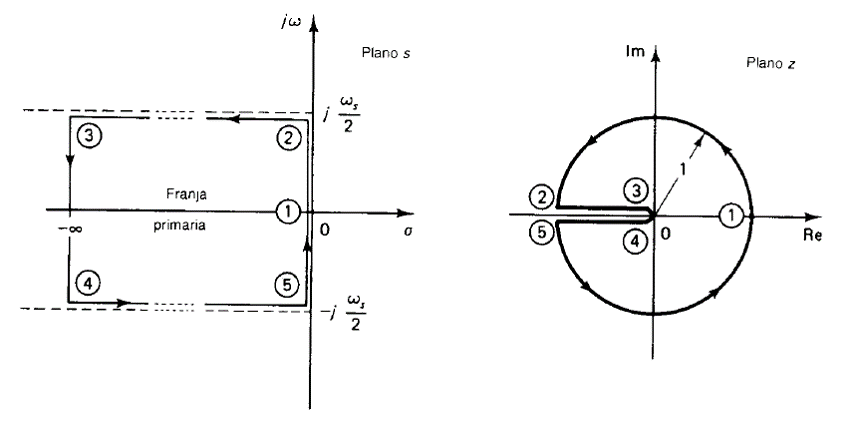
En la franja primaria, si se traza la secuencia de puntos 1-2-3-4-5-1 en el plano , tal trayectoria entonces corresponde a un círculo unitaria con centro en el origen del plano .
Figura 2. Diagramas que muestran la correspondencia entre la franja primaria en el plano s y el círculo unitario en el plano z.
El área encerrada por cualquiera de las franjas complementarias se transforma en el mismo círculo unitario en el plano . Esto significa que la correspondencia unitario en el plano . Esto significa que la correspondencia entre el plano y el plano no es única. Un punto en el plano corresponde a un número infinito de puntos en el plano , aunque un punto en el plano corresponde a un solo punto del plano .
Dado que la totalidad del semiplano izquierdo del plano s corresponde al interior del círculo unitario en el plano , la totalidad del semiplano derecho del plano corresponde al exterior del círculo unitario del plano . Si la frecuencia de muestreo es por lo menos dos veces mayor que la componente de frecuencia más involucrada en el sistema, entonces cada uno de los punto del círculo unitario del plano representarán frecuencias entre y .
Lugar geométrico de atenuación constante
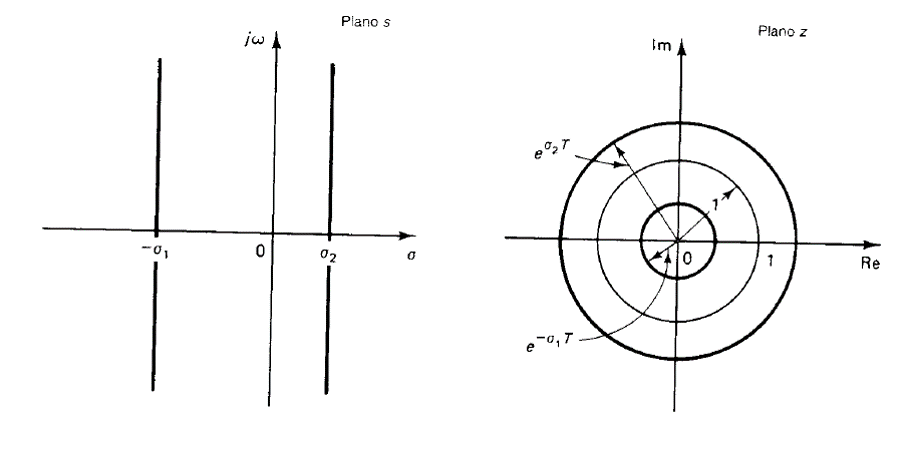
Una línea de atenuación constante (una línea trazada con =cte.) en el plano s corresponde a un círculo unitario de radio con centro en el origen en el plano .
Figura 3. Líneas de atenuación constante en el plano s y lugar geométrico correspondiente en el plano z
Tiempo de asentamiento
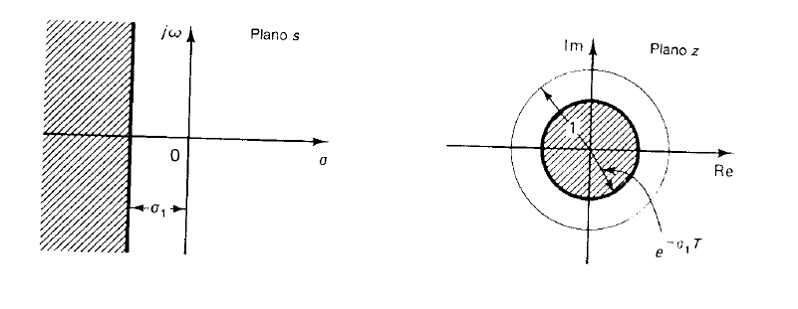
Queda determinado por el valor de la atenuación de los polos dominantes en lazo cerrado. Si se especifica el tiempo de asentamiento es posible dibujar una línea en el plano que corresponda a un tiempo de asentamiento dado. La región en el plano s a la izquierda de la línea corresponde en el plano a la parte interior de un círculo de radio .
Figura 4. Región para un tiempo de asentamiento T, menor que en el plano s (lado izquierdo) y región para un tiempo de asentamiento T, menor que en el plano z.
Lugar geométrico de frecuencia constante
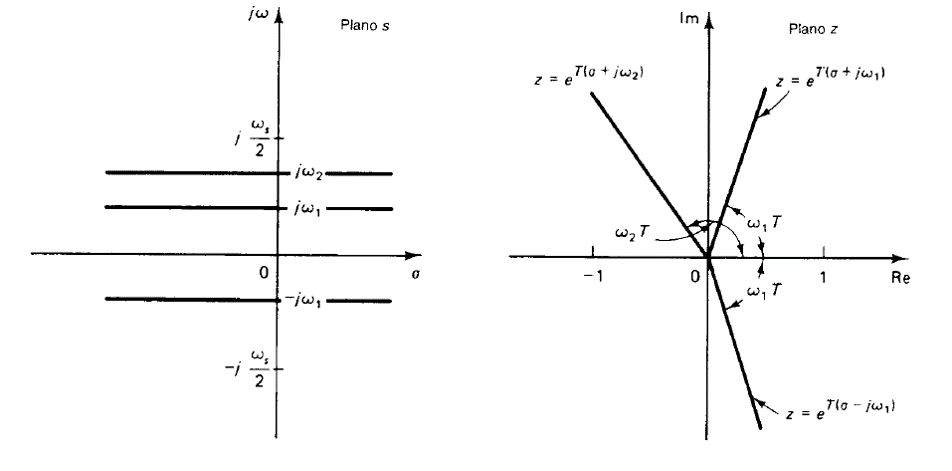
Un lugar geométrico de frecuencia constante en el plano corresponde en el plano a una línea radial de ángulo constante (en radianes). Las líneas de frecuencias constante en en el semiplano izquierdo del plano corresponden al eje negativo entre 0 y -1 en el plano , dado que . Las líneas de frecuencia constante en en el semiplano derecho del plano corresponden al eje real negativo del plano entre -1 y –. El eje real negativo del plano corresponde al eje real positivo del plano entre 0 y 1. Y las líneas de frecuencia constante en () en el semiplano derecho del plano corresponda al eje real positivo del plano , entre 1 e .
Figura 5. Lugares geométricos de frecuencia constante en el plano s (lado izquierdo) y lugares geométricos correspondientes en el plano z (lado derecho).
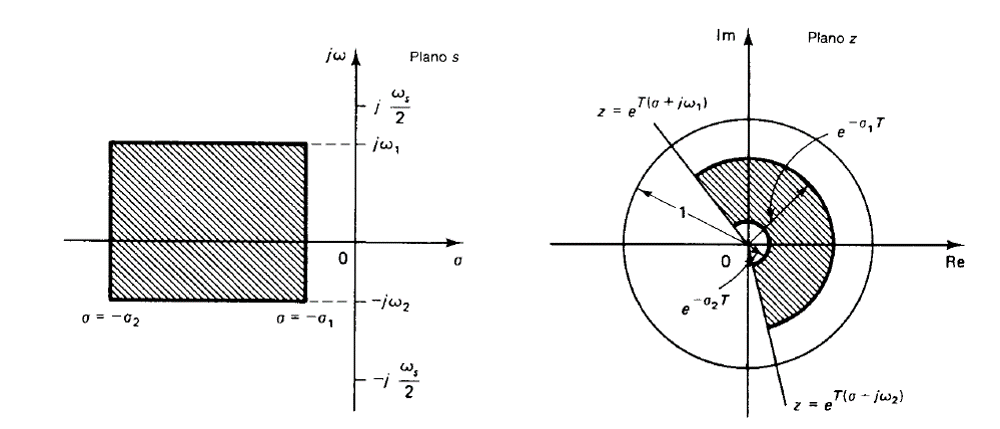
La región limitada por las líneas de frecuencia constante y (donde tanto como ocurre entre y ) y las líneas de atenuación constante y , corresponden a una región limitada por dos líneas radiales y dos arcos circulares.
Figura 6. Región limitada por lineas , , y en el plano s (lado izquierdo) y región correspondiente en el plano z (lado derecho).
Lugares geométricos de factor de amortiguamiento relativo constante
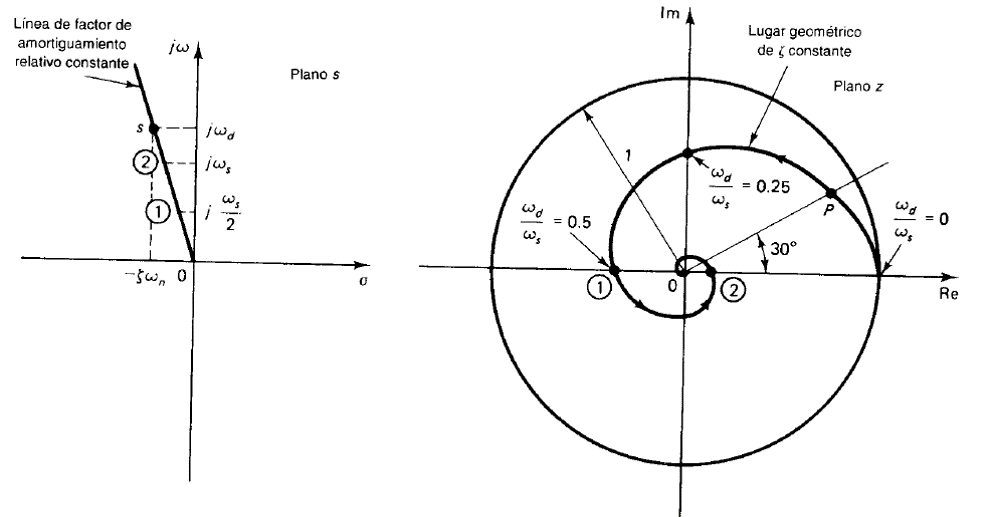
Una línea de factor de amortiguamiento relativo constante (una línea radial) en el plano corresponde a una espiral en el plano . En el plano una línea de factor de amortiguamiento relativo constante puede ser determinada por
En el plano esta línea se convierte en
Si :
Si
Así que
y
Figura 6. Línea de factor de amortiguamiento relativo constante en el plano s (lado izquierdo) y lugar geométrico correspondiente en el plano z (lado derecho).
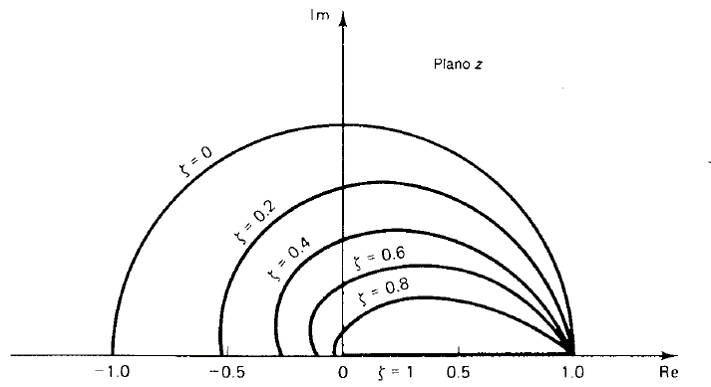
Observe que si la línea de factor de amortiguamiento relativo constante está en el segundo o tercer cuadrante del plano s, entonces la espiral decrece dentro del círculo unitario en el plano . Sin embargo, si esta línea aparece en el primer o cuarto cuadrante en el plano s (lo que corresponde a una amortiguación negativa), entonces la espiral crece por fuera del círculo unitario. En la figura 7 se muestran los lugares geométricos de un factor de amortiguamiento relativo constante para = 0, 0.2, 0.4, 0.6, 0.8 y 1. El lugar geométrico de , es una línea horizontal entre los puntos y . Aquí sólo se muestran los lugares geométricos al semiplano superior del plano , lo que corresponde a . Para son imágenes espejo de los lugares geométricos del semiplano superior del plano en relación con el eje horizontal.
Figura 7. Lugares geométricos del factor de amortiguamiento relativo constante en el plano z.
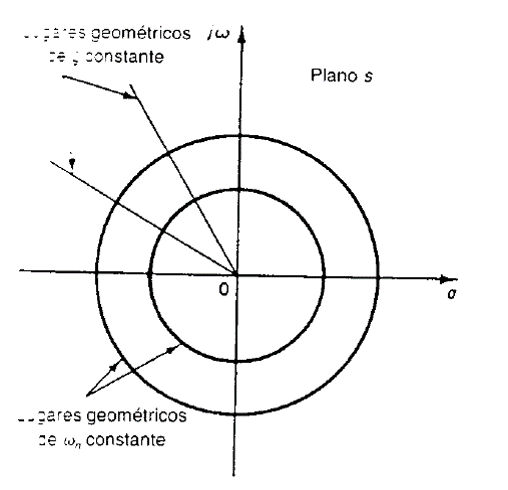
Adviértase que los lugares de constante son normales a los lugares geométricos de constante del plano .
Figura 8. Diagrama que muestra la ortogonalidad (perpendicular) de los lugares geométricos de las constantes y de los lugares geométricos de los constantes dentro del plano s.
En la correspondencia en el plano , los lugares geométricos de constante intersectan las espirales de las constantes en ángulos constantes. Una correlación o transformación como ésta, que conserva tanto la dimensión como el sentido de los ángulos, se conoce como mapeo o correspondencia conforme.
Figura 9. Diagrama correspondiente al plano z.
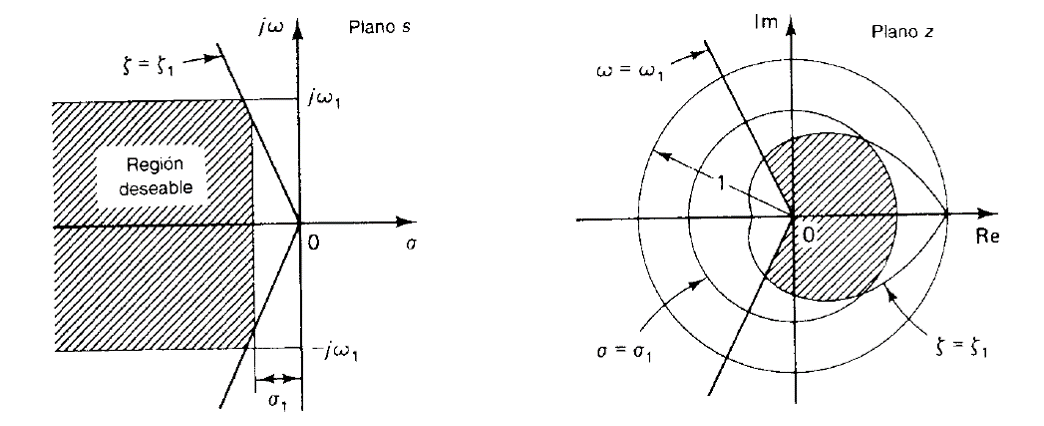
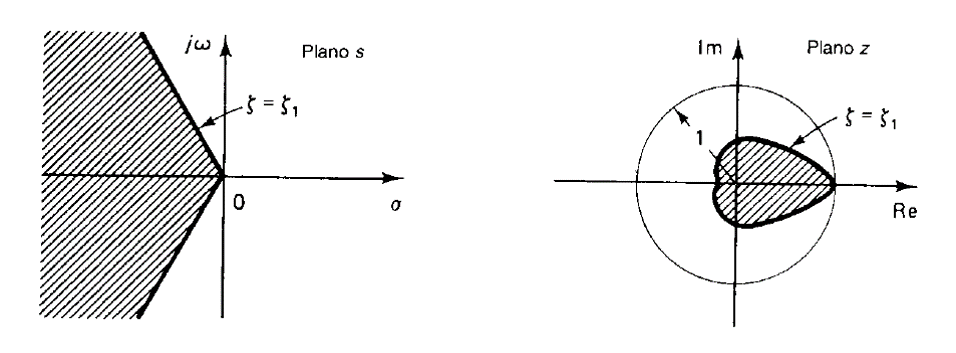
Regiones del plano s y del plano z para ζ > ζ_1.
En la figura 10 muestra los lugares geométricos de constante () tanto en el plano como en el plano . Note que las espirales logarítmicas mostradas corresponden a la franja primaria del plano .
Figura 10. Región correspondiente a en el plano s (lado izquierdo) y en el plano z (lado derecho).
Si todos los polos del plano definen como con un factor de amortiguamiento relativo no menor que el valor especificado , entonces los polos deberán ocurrir a la izquierda de la línea de factor de amortiguamiento relativo constante en el plano (la región sombreada). En el plano , los polos deberán presentarse en la región limitada por espirales logarítmicas correspondientes a (región sombreada).
Figura 11. Una región deseable en el plano s para la localización de los polos en lazo cerrado (lado izquierdo) y región correspondiente al plano z (lado derecho).
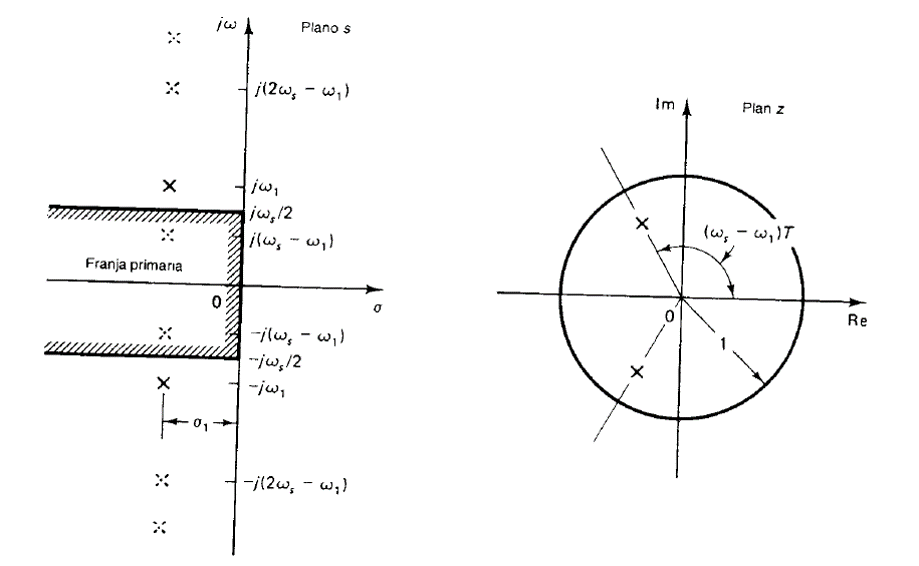
Si el período de muestreo es largo y el teorema de muestreo no es satisfecho, ocurrirán un doblamiento en frecuencia y se modificarán las localizaciones efectivas de polos y ceros. Suponga que un sistema de control en tiempo continuo tiene en el plano s polos en lazo cerrado en . Si el sistema se involucra la operación de muestreo y si , ocurrirá un doblamiento de frecuencia y el sistema tendrá polos en , donde . Esto significa que la operación de muestreo dobla los polos exteriores en la franja primaria hacia el interior de la franja primaria, y los polos volverán a aparecer en .
Figura 12. Diagrama que muestra los polos en el plano s en y los polos con doblamiento que aparecen en , , … , y correspondencia en el plano z de los polos del plano s en , , , … .
Dedicado a compartir información temas referentes al cálculo básicos, intermedios y avanzados mediante presentaciones PDF, videos y publicaciones en este sitio web.
Ver todas las entradas de Cesar Reyes






























 en el plano s (lado izquierdo) y región para un tiempo de asentamiento T, menor que
en el plano s (lado izquierdo) y región para un tiempo de asentamiento T, menor que 

















![\displaystyle z= \text{exp} \left[ T(-\zeta \omega_n + j\omega_d) \right] = \text{exp} \left[ T \left( -\frac{\zeta \omega_d}{\sqrt{1 - \zeta^2}} + j\omega_d \right) \right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+z%3D+%5Ctext%7Bexp%7D+%5Cleft%5B+T%28-%5Czeta+%5Comega_n+%2B+j%5Comega_d%29+%5Cright%5D+%3D+%5Ctext%7Bexp%7D+%5Cleft%5B+T+%5Cleft%28+-%5Cfrac%7B%5Czeta+%5Comega_d%7D%7B%5Csqrt%7B1+-+%5Czeta%5E2%7D%7D+%2B+j%5Comega_d+%5Cright%29+%5Cright%5D&bg=ffffff&fg=192930&s=0&c=20201002)
![\displaystyle z = \text{exp} \left[{T \left( -\frac{\zeta \omega_d}{\sqrt{1-\zeta^2}} + j\omega_d \right) \left( \frac{\omega_s}{\omega_s} \right)} \right] = \text{exp} \left[ T \left(-\frac{\zeta \omega_s}{\sqrt{1-\zeta^2}} + j\omega_s \right) \left( \frac{\omega_d}{\omega_s} \right) \right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+z+%3D+%5Ctext%7Bexp%7D+%5Cleft%5B%7BT+%5Cleft%28+-%5Cfrac%7B%5Czeta+%5Comega_d%7D%7B%5Csqrt%7B1-%5Czeta%5E2%7D%7D+%2B+j%5Comega_d+%5Cright%29+%5Cleft%28+%5Cfrac%7B%5Comega_s%7D%7B%5Comega_s%7D+%5Cright%29%7D+%5Cright%5D+%3D+%5Ctext%7Bexp%7D+%5Cleft%5B+T+%5Cleft%28-%5Cfrac%7B%5Czeta+%5Comega_s%7D%7B%5Csqrt%7B1-%5Czeta%5E2%7D%7D+%2B+j%5Comega_s+%5Cright%29+%5Cleft%28+%5Cfrac%7B%5Comega_d%7D%7B%5Comega_s%7D+%5Cright%29+%5Cright%5D&bg=ffffff&fg=192930&s=0&c=20201002)
![\displaystyle z = \text{exp} \left[ T \left( -\frac{\zeta \omega_s}{\sqrt{1-\zeta^2}} + j\omega_s \right) \left(\frac{\omega_d}{\omega_s} \right) \right] = \text{exp} \left[ T \left(-\frac{\zeta \cdot \left( \frac{2\pi}{T} \right)}{\sqrt{1-\zeta^2}} + j \frac{2\pi}{T} \right) \left( \frac{\omega_d}{\omega_s} \right) \right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+z+%3D+%5Ctext%7Bexp%7D+%5Cleft%5B+T+%5Cleft%28+-%5Cfrac%7B%5Czeta+%5Comega_s%7D%7B%5Csqrt%7B1-%5Czeta%5E2%7D%7D+%2B+j%5Comega_s+%5Cright%29+%5Cleft%28%5Cfrac%7B%5Comega_d%7D%7B%5Comega_s%7D+%5Cright%29+%5Cright%5D+%3D+%5Ctext%7Bexp%7D+%5Cleft%5B+T+%5Cleft%28-%5Cfrac%7B%5Czeta+%5Ccdot+%5Cleft%28+%5Cfrac%7B2%5Cpi%7D%7BT%7D+%5Cright%29%7D%7B%5Csqrt%7B1-%5Czeta%5E2%7D%7D+%2B+j+%5Cfrac%7B2%5Cpi%7D%7BT%7D+%5Cright%29+%5Cleft%28+%5Cfrac%7B%5Comega_d%7D%7B%5Comega_s%7D+%5Cright%29+%5Cright%5D&bg=ffffff&fg=192930&s=0&c=20201002)
![\displaystyle z = \text{exp} \left[ \left(- \frac{2\pi \zeta }{\sqrt{1-\zeta^2} } + j 2\pi \right) \left( \frac{\omega_d}{\omega_s} \right) \right] = \text{exp} \left[ - \frac{2\pi \zeta}{\sqrt{1-\zeta^2}} \cdot \frac{\omega_d}{\omega_s} + j2\pi \cdot \frac{\omega_d}{\omega_s} \right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+z+%3D+%5Ctext%7Bexp%7D+%5Cleft%5B+%5Cleft%28-+%5Cfrac%7B2%5Cpi+%5Czeta+%7D%7B%5Csqrt%7B1-%5Czeta%5E2%7D+%7D+%2B+j+2%5Cpi+%5Cright%29+%5Cleft%28+%5Cfrac%7B%5Comega_d%7D%7B%5Comega_s%7D+%5Cright%29+%5Cright%5D+%3D+%5Ctext%7Bexp%7D+%5Cleft%5B+-+%5Cfrac%7B2%5Cpi+%5Czeta%7D%7B%5Csqrt%7B1-%5Czeta%5E2%7D%7D+%5Ccdot+%5Cfrac%7B%5Comega_d%7D%7B%5Comega_s%7D+%2B+j2%5Cpi+%5Ccdot+%5Cfrac%7B%5Comega_d%7D%7B%5Comega_s%7D+%5Cright%5D&bg=ffffff&fg=192930&s=0&c=20201002)
![\displaystyle |z|= \text{exp} \left[ -\frac{2\pi \zeta}{\sqrt{1-\zeta^2}} \cdot \frac{\omega_d}{\omega_s} \right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7Cz%7C%3D+%5Ctext%7Bexp%7D+%5Cleft%5B+-%5Cfrac%7B2%5Cpi+%5Czeta%7D%7B%5Csqrt%7B1-%5Czeta%5E2%7D%7D+%5Ccdot+%5Cfrac%7B%5Comega_d%7D%7B%5Comega_s%7D+%5Cright%5D&bg=ffffff&fg=192930&s=0&c=20201002)








 constantes y de los lugares geométricos de los
constantes y de los lugares geométricos de los 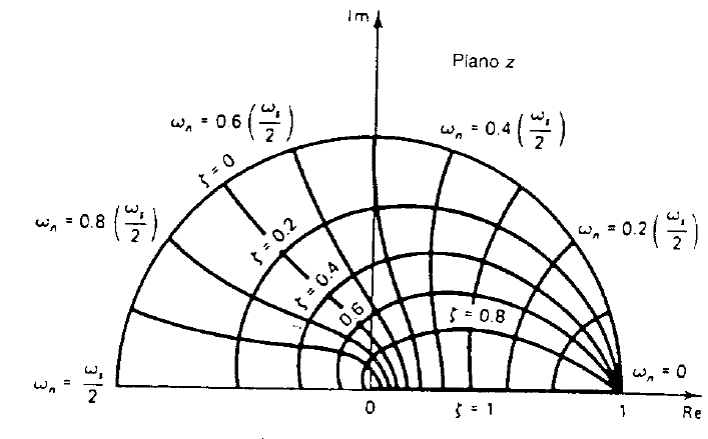

 en el plano s (lado izquierdo) y en el plano z (lado derecho).
en el plano s (lado izquierdo) y en el plano z (lado derecho).