Sistema en tiempo discreto
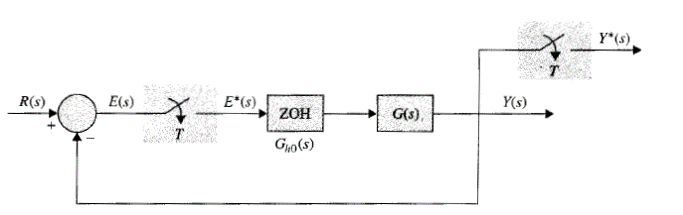
Considere el sistema en tiempo discreto ilustrado en la figura 1. La función de transferencia del sistema en lazo cerrado es:

Donde
![G_{h0} G(z) = Z[G_{h0} (s)G(s)]](https://s0.wp.com/latex.php?latex=G_%7Bh0%7D+G%28z%29+%3D+Z%5BG_%7Bh0%7D+%28s%29G%28s%29%5D&bg=ffffff&fg=192930&s=0&c=20201002)
Tal como en el caso de sistemas en tiempo continuo, las condiciones de estabilidades absoluta relativa y absoluta del sistema en tiempo continuo en lazo cerrado se pueden investigar al hacer las trazas en el dominio de la frecuencia de 














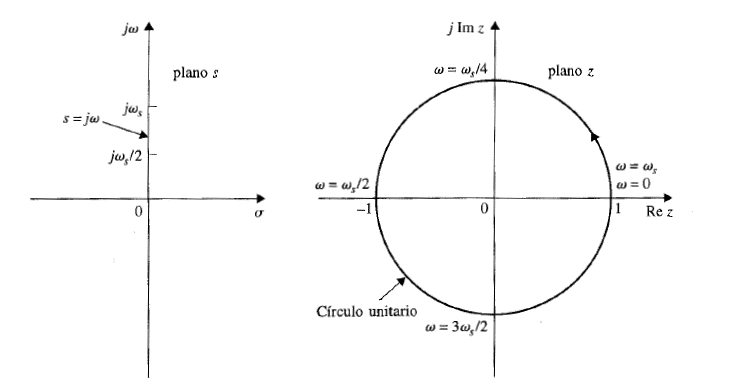 en el plano s y el círculo unitario en el plano z.
en el plano s y el círculo unitario en el plano z.La traza de bode con la transformada w
La transformada w se obtiene mediante el “método de transformación bilineal”. Existen muchas transformaciones bilineales de la forma:

En donde 






Que se conoce como transformada
Otra transformada que a menudo se utiliza en el diseño de sistemas de control en tiempo discreto en el dominio de la frecuencia es:


La ventaja de la transformada 


![\displaystyle w = (\frac{2}{T}) \left[ \frac{j\sin{\omega t}(\cos{\omega T} + 1) - j\sin{\omega T}(\cos{\omega T} - 1)}{2 (\cos{\omega T} + 1)} \right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+w+%3D+%28%5Cfrac%7B2%7D%7BT%7D%29+%5Cleft%5B+%5Cfrac%7Bj%5Csin%7B%5Comega+t%7D%28%5Ccos%7B%5Comega+T%7D+%2B+1%29+-+j%5Csin%7B%5Comega+T%7D%28%5Ccos%7B%5Comega+T%7D+-+1%29%7D%7B2+%28%5Ccos%7B%5Comega+T%7D+%2B+1%29%7D+%5Cright%5D&bg=ffffff&fg=192930&s=0&c=20201002)

Por lo que el círculo unitario en el plano 


En donde 
Para el análisis en el dominio de la frecuencia de un sistema en tiempo discreto, se sustituyen esas ecuaciones en G(z) para obtener 
Problema resuelto
Problema 1. Sea la función de transferencia del proceso del sistema de la figura 1 como sigue:

Y la frecuencia de muestreo es 4 rad/seg.
Solución. Con retenedor de orden cero

![\displaystyle \mathcal{Z} [G_{h0} G(s)] = (1.57) Z[(1-e^{-Ts}) \frac{1}{s^2 (s+1)}] = (1.57)(1-z^{-1}) Z \left[\frac{1}{s^2 (s+1)} \right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cmathcal%7BZ%7D+%5BG_%7Bh0%7D+G%28s%29%5D+%3D+%281.57%29+Z%5B%281-e%5E%7B-Ts%7D%29+%5Cfrac%7B1%7D%7Bs%5E2+%28s%2B1%29%7D%5D+%3D+%281.57%29%281-z%5E%7B-1%7D%29+Z+%5Cleft%5B%5Cfrac%7B1%7D%7Bs%5E2+%28s%2B1%29%7D+%5Cright%5D&bg=ffffff&fg=192930&s=0&c=20201002)
Por fracciones parciales


Donde

Aplicando transformada inversa de Laplace, sustituyendo 

![\displaystyle \mathcal{L}^{-1} [\frac{1}{s^2 (s+1)}] = \mathcal{L}^{-1} [\frac{1}{s^2} -\frac{1}{s} + \frac{1}{(s+1)}] = t-1+e^{-t} = (kT-1+e^{-kT})](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cmathcal%7BL%7D%5E%7B-1%7D+%5B%5Cfrac%7B1%7D%7Bs%5E2+%28s%2B1%29%7D%5D+%3D+%5Cmathcal%7BL%7D%5E%7B-1%7D+%5B%5Cfrac%7B1%7D%7Bs%5E2%7D+-%5Cfrac%7B1%7D%7Bs%7D+%2B+%5Cfrac%7B1%7D%7B%28s%2B1%29%7D%5D+%3D+t-1%2Be%5E%7B-t%7D+%3D+%28kT-1%2Be%5E%7B-kT%7D%29&bg=ffffff&fg=192930&s=0&c=20201002)
![\displaystyle \mathcal{Z} [kT-1+e^{-kT} ] = \frac{Tz^{-1}}{{(1-z^{-1})}^2} - \frac{1}{(1-z^{-1})} + \frac{1}{(1-e^{-T} z^{-1})}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cmathcal%7BZ%7D+%5BkT-1%2Be%5E%7B-kT%7D+%5D+%3D+%5Cfrac%7BTz%5E%7B-1%7D%7D%7B%7B%281-z%5E%7B-1%7D%29%7D%5E2%7D+-+%5Cfrac%7B1%7D%7B%281-z%5E%7B-1%7D%29%7D+%2B+%5Cfrac%7B1%7D%7B%281-e%5E%7B-T%7D+z%5E%7B-1%7D%29%7D&bg=ffffff&fg=192930&s=0&c=20201002)
![\displaystyle \mathcal{Z} [kT-1+e^{-kT} ] = \frac{Tz}{(z-1)^2} - \frac{z}{(z-1)} + \frac{z}{(z-e^{-T})} = \frac{(T + e^{-T} - 1)z + (1-e^{-T} - Te^{-T}) z^2}{{(z-1)}^2 (z - e^{-T})}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cmathcal%7BZ%7D+%5BkT-1%2Be%5E%7B-kT%7D+%5D+%3D+%5Cfrac%7BTz%7D%7B%28z-1%29%5E2%7D+-+%5Cfrac%7Bz%7D%7B%28z-1%29%7D+%2B+%5Cfrac%7Bz%7D%7B%28z-e%5E%7B-T%7D%29%7D+%3D+%5Cfrac%7B%28T+%2B+e%5E%7B-T%7D+-+1%29z+%2B+%281-e%5E%7B-T%7D+-+Te%5E%7B-T%7D%29+z%5E2%7D%7B%7B%28z-1%29%7D%5E2+%28z+-+e%5E%7B-T%7D%29%7D&bg=ffffff&fg=192930&s=0&c=20201002)
Regresando
![\displaystyle \mathcal{Z} [G_{h0} G(s)] = (1.57) \mathcal{Z} [(1-e^{-Ts}) \frac{1}{s^2 (s+1)}] = (1.57)(1 - z^{-1}) \mathcal{Z} [\frac{1}{s^2 (s+1)}]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cmathcal%7BZ%7D+%5BG_%7Bh0%7D+G%28s%29%5D+%3D+%281.57%29+%5Cmathcal%7BZ%7D+%5B%281-e%5E%7B-Ts%7D%29+%5Cfrac%7B1%7D%7Bs%5E2+%28s%2B1%29%7D%5D+%3D+%281.57%29%281+-+z%5E%7B-1%7D%29+%5Cmathcal%7BZ%7D+%5B%5Cfrac%7B1%7D%7Bs%5E2+%28s%2B1%29%7D%5D&bg=ffffff&fg=192930&s=0&c=20201002)
![\displaystyle \mathcal{Z} [G_{h0} G(s)] = (1.57) \cdot (1-z^{-1}) \cdot \frac{(T + e^{-T} - 1)z + (1-e^{-T} - Te^{-T}) z^2}{{(z-1)}^2 (z - e^{-T})}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cmathcal%7BZ%7D+%5BG_%7Bh0%7D+G%28s%29%5D+%3D+%281.57%29+%5Ccdot+%281-z%5E%7B-1%7D%29+%5Ccdot+%5Cfrac%7B%28T+%2B+e%5E%7B-T%7D+-+1%29z+%2B+%281-e%5E%7B-T%7D+-+Te%5E%7B-T%7D%29+z%5E2%7D%7B%7B%28z-1%29%7D%5E2+%28z+-+e%5E%7B-T%7D%29%7D&bg=ffffff&fg=192930&s=0&c=20201002)
![\displaystyle \mathcal{Z} [G_{h0} G(s)] = 1.57[\frac{(T+e^{-T}-1)z+ (1-e^{-T}-Te^{-T} ) z^2}{(z-1)(z-e^{-T})} ]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cmathcal%7BZ%7D+%5BG_%7Bh0%7D+G%28s%29%5D+%3D+1.57%5B%5Cfrac%7B%28T%2Be%5E%7B-T%7D-1%29z%2B+%281-e%5E%7B-T%7D-Te%5E%7B-T%7D+%29+z%5E2%7D%7B%28z-1%29%28z-e%5E%7B-T%7D%29%7D+%5D&bg=ffffff&fg=192930&s=0&c=20201002)
Si la frecuencia de muestreo es de 

Sustituyendo en el resultado de la transformada
![\displaystyle \mathcal{Z} [G_{h0} G(s)] = 1.57[\frac{(T+e^{-T} - 1)z+(1-e^{-T}-Te^{-T}) z^2}{(z-1)(z-e^{-T})} ]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cmathcal%7BZ%7D+%5BG_%7Bh0%7D+G%28s%29%5D+%3D+1.57%5B%5Cfrac%7B%28T%2Be%5E%7B-T%7D+-+1%29z%2B%281-e%5E%7B-T%7D-Te%5E%7B-T%7D%29+z%5E2%7D%7B%28z-1%29%28z-e%5E%7B-T%7D%29%7D+%5D&bg=ffffff&fg=192930&s=0&c=20201002)
![\displaystyle \mathcal{Z} [G_{h0} G(s)] = 1.57[\frac{(1.571+e^(-1.571)-1)z+(1-e^(-1.571)-1.571e^(-1.571) ) z^2}{(z-1)(z-e^(-1.571))} ]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cmathcal%7BZ%7D+%5BG_%7Bh0%7D+G%28s%29%5D+%3D+1.57%5B%5Cfrac%7B%281.571%2Be%5E%28-1.571%29-1%29z%2B%281-e%5E%28-1.571%29-1.571e%5E%28-1.571%29+%29+z%5E2%7D%7B%28z-1%29%28z-e%5E%28-1.571%29%29%7D+%5D&bg=ffffff&fg=192930&s=0&c=20201002)

Ahora , sin retenedor de orden cero
![\displaystyle \mathcal{Z} [G(s)] = Z[\frac{1.57}{s(s+1)}] = (1.57)Z[\frac{1}{s(s+1)}]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cmathcal%7BZ%7D+%5BG%28s%29%5D+%3D+Z%5B%5Cfrac%7B1.57%7D%7Bs%28s%2B1%29%7D%5D+%3D+%281.57%29Z%5B%5Cfrac%7B1%7D%7Bs%28s%2B1%29%7D%5D&bg=ffffff&fg=192930&s=0&c=20201002)
Aplicando fracciones parciales


Donde 
Aplicando transformada inversa de Laplace, sustituyendo

![\displaystyle \mathcal{L}^{-1} [\frac{1}{s(s+1)}] = \mathcal{L}^{-1} [\frac{1}{s} - \frac{1}{(s+1)}] = 1 - e^{-t} = 1-e^{-kT}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cmathcal%7BL%7D%5E%7B-1%7D+%5B%5Cfrac%7B1%7D%7Bs%28s%2B1%29%7D%5D+%3D+%5Cmathcal%7BL%7D%5E%7B-1%7D+%5B%5Cfrac%7B1%7D%7Bs%7D+-+%5Cfrac%7B1%7D%7B%28s%2B1%29%7D%5D+%3D+1+-+e%5E%7B-t%7D+%3D+1-e%5E%7B-kT%7D&bg=ffffff&fg=192930&s=0&c=20201002)
![\displaystyle \mathcal{Z} [1 - e^{-kT}] = \frac{1}{(1-z^{-1})} - \frac{1}{(1-e^{-T} z^{-1})} = \frac{z}{(z-1)} - \frac{z}{(z-e^{-T})}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cmathcal%7BZ%7D+%5B1+-+e%5E%7B-kT%7D%5D+%3D+%5Cfrac%7B1%7D%7B%281-z%5E%7B-1%7D%29%7D+-+%5Cfrac%7B1%7D%7B%281-e%5E%7B-T%7D+z%5E%7B-1%7D%29%7D+%3D+%5Cfrac%7Bz%7D%7B%28z-1%29%7D+-+%5Cfrac%7Bz%7D%7B%28z-e%5E%7B-T%7D%29%7D&bg=ffffff&fg=192930&s=0&c=20201002)
![\displaystyle \mathcal{Z} [1 - e^{-kT}] = (1-e^{-T}) \frac{z}{(z-1)(z-e^{-T})}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cmathcal%7BZ%7D+%5B1+-+e%5E%7B-kT%7D%5D+%3D+%281-e%5E%7B-T%7D%29+%5Cfrac%7Bz%7D%7B%28z-1%29%28z-e%5E%7B-T%7D%29%7D&bg=ffffff&fg=192930&s=0&c=20201002)
Regresando y sustituyendo con el valor de 
![\displaystyle G(z) =1.57 \left[\frac{(1-e^{-T} )z}{(z-1)(z-e^{-T})} \right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+G%28z%29%C2%A0+%3D1.57+%5Cleft%5B%5Cfrac%7B%281-e%5E%7B-T%7D+%29z%7D%7B%28z-1%29%28z-e%5E%7B-T%7D%29%7D+%5Cright%5D&bg=ffffff&fg=192930&s=0&c=20201002)
![\displaystyle G(z) = 1.57 \left[\frac{(1-e^{-1.571} )z}{(z-1)(z-e^{-1.571})} \right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+G%28z%29+%3D+1.57+%5Cleft%5B%5Cfrac%7B%281-e%5E%7B-1.571%7D+%29z%7D%7B%28z-1%29%28z-e%5E%7B-1.571%7D%29%7D+%5Cright%5D&bg=ffffff&fg=192930&s=0&c=20201002)

Entonces, si el sistema no tiene un retenedor de orden cero, el sistema a tomar es la ecuación anterior. Ahora, La respuesta en frecuencia de 


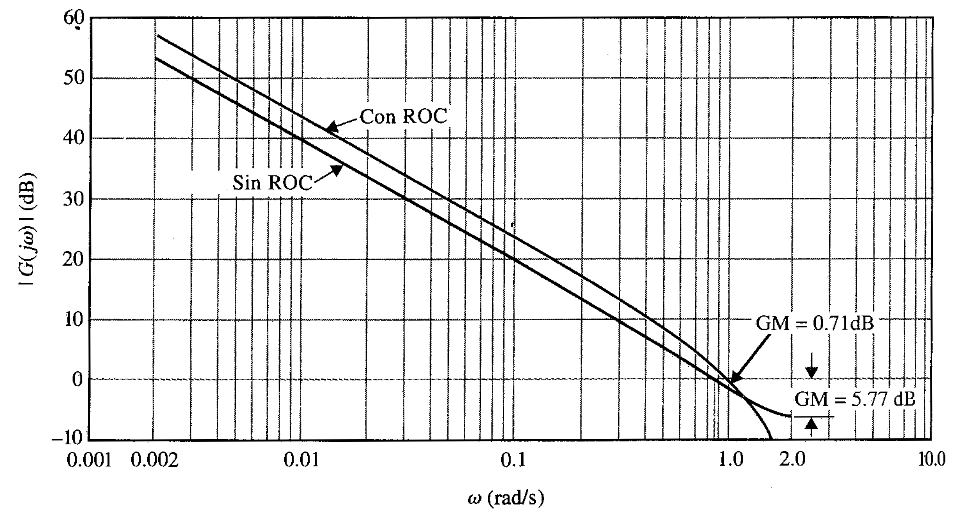
Figura 3. Trazas de Bode de G_{h0} G(z) del sistema, con G(s) = 1.57 / [s(s+1)], T=1.57 (seg), con retenedor de orden cero y sin retenedor de orden cero. 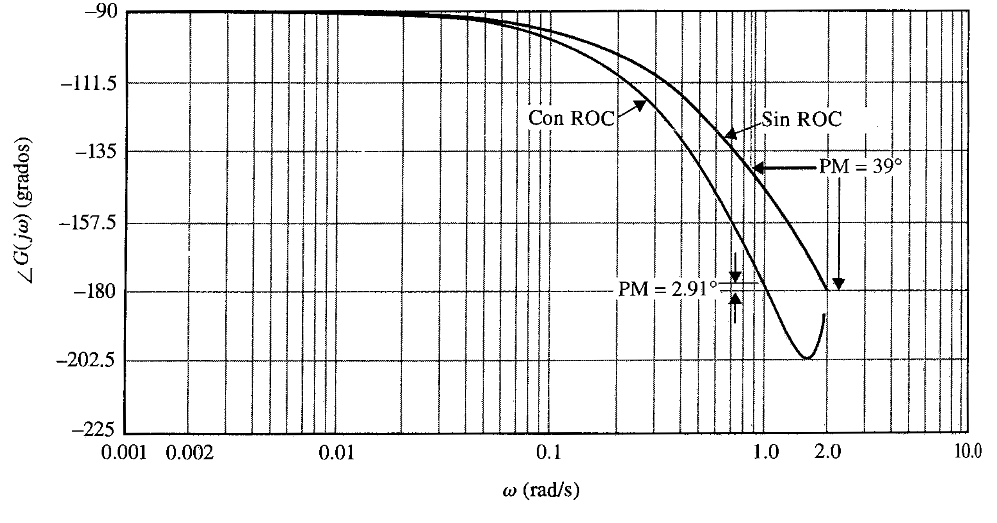
Figura 4. Trazas de Bode de G_{h0} G(z) del sistema, con G(s) = 1.57 / [s(s+1)], T=1.57 (seg), con retenedor de orden cero y sin retenedor de orden cero.
 del sistema, con
del sistema, con ![G(s) = 1.57 / [s(s+1)]](https://s0.wp.com/latex.php?latex=G%28s%29+%3D+1.57+%2F+%5Bs%28s%2B1%29%5D&bg=ffffff&fg=192930&s=0&c=20201002) , T=1.57 s, y que incluye el retenedor de orden cero (ROC) y sin el retenedor.
, T=1.57 s, y que incluye el retenedor de orden cero (ROC) y sin el retenedor.Tomando el resultado final que incluye el retenedor de orden cero

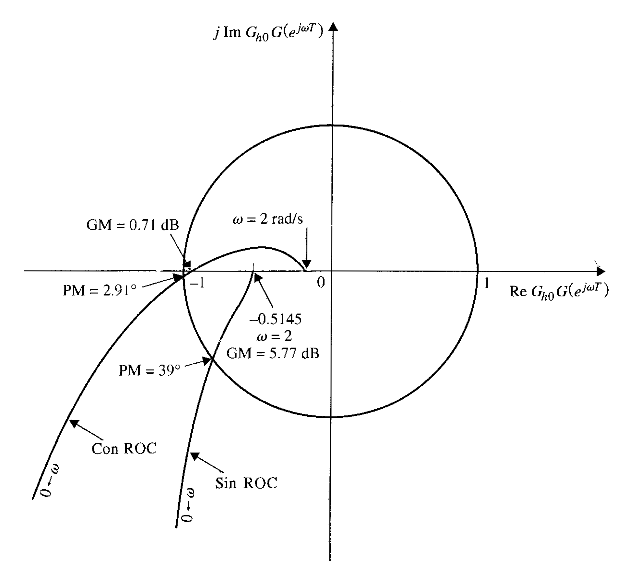
se muestran en las figuras 3, 4 y 5 la traza polar y las trazas de Bode. En la traza polar del sistema con el retenedor de orden cero se intersecta con el eje real negativo en un punto más cercano al punto 
Como alternativa, las trazas de Bode y la traza polar de la función de transferencia de la trayectoria directa se pueden efectuar utilizando la transformada

Si T=1.571 (seg), resulta





}{(1.273+w-1.273+w)[1.273+w-0.208(1.273-w)]}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+G_%7Bh0%7D+G%28w%29+%3D+%5Cfrac%7B%5B1.557%2B1.223w%2B%280.732%29%281.273-w%29%5D%281.273-w%29%7D%7B%281.273%2Bw-1.273%2Bw%29%5B1.273%2Bw-0.208%281.273-w%29%5D%7D&bg=ffffff&fg=192930&s=0&c=20201002)




*Nota. El autor Benjamín C. Kuo, del libro Sistemas de control automático, brinda un resultado diferente al obtenido anteriormente, y es

Y para el resultado del sistema sin retenedor de orden cero, aplicando la transformada w tiene la siguiente expresión

Si T=1.571 seg, resulta



![\displaystyle G(w) = \frac{1.243(1.273+w)(1.273-w)}{(1.273+w-1.273+w)[1.273+w-0.208(1.273-w)]}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+G%28w%29+%3D+%5Cfrac%7B1.243%281.273%2Bw%29%281.273-w%29%7D%7B%281.273%2Bw-1.273%2Bw%29%5B1.273%2Bw-0.208%281.273-w%29%5D%7D&bg=ffffff&fg=192930&s=0&c=20201002)





*Nota. El autor Benjamín C. Kuo, del libro Sistemas de control automático, brinda un resultado diferente al obtenido anteriormente, y es

Sustituyendo esta última ecuación 
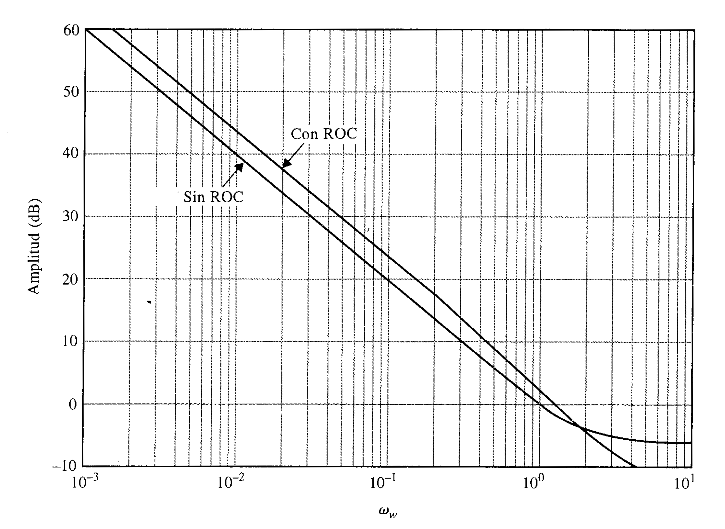
Figura 6. Trazas de Bode de G_{h0} G(z) del sistema, con G(s) = 1.57 / [s(s+1)], T=1.57 (seg), con retenedor de orden cero y sin retenedor de orden cero, en base a w = jω_n. 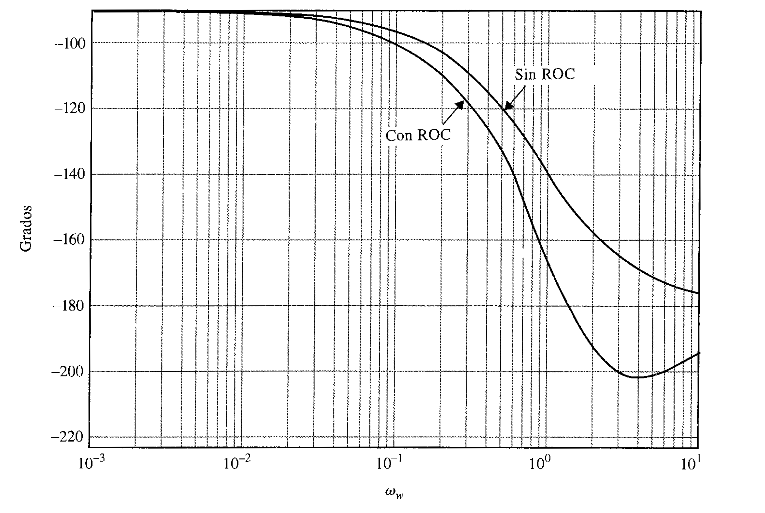
Figura 7. Trazas de Bode de G_{h0} G(z) del sistema, con G(s) = 1.57 / [s(s+1)], T=1.57 (seg), con retenedor de orden cero y sin retenedor de orden cero, , en base a w = jω_n.
Se concluye en este problema que una vez reemplazado z por 
