Introducción
Considerar el siguiente sistema con función de transferencia pulso en lazo cerrado
 | (1) |
La estabilidad del sistema que define la ecuación (1), así como la de otros tipos de sistemas de control en tiempo discreto, puede determinarse por las localizaciones de los polos en lazo cerrado en el plano z, o por las raíces de la ecuación característica:

Como sigue
- Para que el sistema sea estable, los polos en lazo cerrado o las raíces de la ecuación característica deben presentarse en el plano z dentro del círculo unitario.
- Si un polo simple se presenta en z=1, entonces el sistema se vuelve críticamente estable. También ocurre si solo un par de polos complejos conjugados se presentan sobre el círculo unitario. Cualquier polo múltiple, el sistema es inestable en el círculo unitario.
- Los ceros en lazo cerrado no afectan la estabilidad absoluta y por lo tanto pueden quedar localizados cualquier parte del plano z.
Problema resuelto
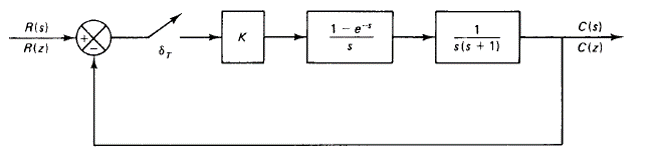
Problema 1. Considere el sistema de control en lazo cerrado. Determine la estabilidad hallando para que valor de K lo es. La función de transferencia G(s) es:

Solución. Se reacomodan los terminos de los cocientes brindados por el problema.

Determinando su transformada

![\displaystyle \mathcal{Z} [G(s)] = K \cdot Z \left[ (1-e^{-s}) \cdot \frac{1}{s^2 (s+1)} \right] = K (1-z^{-1}) \cdot Z \left[ \frac{1}{s^2 (s+1)} \right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cmathcal%7BZ%7D+%5BG%28s%29%5D+%3D+K+%5Ccdot+Z+%5Cleft%5B+%281-e%5E%7B-s%7D%29+%5Ccdot+%5Cfrac%7B1%7D%7Bs%5E2+%28s%2B1%29%7D+%5Cright%5D+%3D+K+%281-z%5E%7B-1%7D%29+%5Ccdot+Z+%5Cleft%5B+%5Cfrac%7B1%7D%7Bs%5E2+%28s%2B1%29%7D+%5Cright%5D&bg=ffffff&fg=192930&s=0&c=20201002)
Para poder determinar esto último, se resuelve primero hallando su transformada inversa de Laplace, partiendo del desarrollo fracciones parciales




Donde los valores son 


Y el equivalente (desarrollo por fracciones parciales) es

Entonces, su transformada inversa de Laplace es
![\displaystyle \mathcal{L}^{-1} \left[ \frac{1}{s^2 (s+1)} \right] = \mathcal{L}^{-1} \left[ \frac{1}{s^2} - \frac{1}{s} + \frac{1}{(s+1)} \right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cmathcal%7BL%7D%5E%7B-1%7D+%5Cleft%5B+%5Cfrac%7B1%7D%7Bs%5E2+%28s%2B1%29%7D+%5Cright%5D+%3D+%5Cmathcal%7BL%7D%5E%7B-1%7D+%5Cleft%5B+%5Cfrac%7B1%7D%7Bs%5E2%7D+-+%5Cfrac%7B1%7D%7Bs%7D+%2B+%5Cfrac%7B1%7D%7B%28s%2B1%29%7D+%5Cright%5D&bg=ffffff&fg=192930&s=0&c=20201002)
![\displaystyle \mathcal{L}^{-1} \left[ \frac{1}{s^2 (s+1)} \right] = t - 1 + e^{-t}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cmathcal%7BL%7D%5E%7B-1%7D+%5Cleft%5B+%5Cfrac%7B1%7D%7Bs%5E2+%28s%2B1%29%7D+%5Cright%5D+%3D+t+-+1+%2B+e%5E%7B-t%7D+&bg=ffffff&fg=192930&s=0&c=20201002)
Remplazando t por kT

Regresando y aplicando la transformada
![\displaystyle \mathcal{Z} [G(s)] = K (1-z^{-1}) \cdot Z \left[ \frac{1}{s^2 (s+1)} \right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cmathcal%7BZ%7D+%5BG%28s%29%5D+%3D+K+%281-z%5E%7B-1%7D%29+%5Ccdot+Z+%5Cleft%5B+%5Cfrac%7B1%7D%7Bs%5E2+%28s%2B1%29%7D+%5Cright%5D&bg=ffffff&fg=192930&s=0&c=20201002)
![\displaystyle \mathcal{Z} \left[ G(s) \right] = K (1-z^{-1}) \cdot Z [(kT) - 1(kT) + e^{-kT}]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cmathcal%7BZ%7D+%5Cleft%5B+G%28s%29+%5Cright%5D+%3D+K+%281-z%5E%7B-1%7D%29+%5Ccdot+Z+%5B%28kT%29+-+1%28kT%29+%2B+e%5E%7B-kT%7D%5D&bg=ffffff&fg=192930&s=0&c=20201002)
![\displaystyle \mathcal{Z} \left[ G(s) \right] = K (1-z^{-1}) \cdot \frac{(T-1+e^{-T}) z^{-1} + (1-e^{-T} - Te^{-T}) z^{-2}}{{(1-z^{-1})}^2 (1-e^{-T} z^{-1})}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cmathcal%7BZ%7D+%5Cleft%5B+G%28s%29+%5Cright%5D+%3D+K+%281-z%5E%7B-1%7D%29+%5Ccdot+%5Cfrac%7B%28T-1%2Be%5E%7B-T%7D%29+z%5E%7B-1%7D+%2B+%281-e%5E%7B-T%7D+-+Te%5E%7B-T%7D%29+z%5E%7B-2%7D%7D%7B%7B%281-z%5E%7B-1%7D%29%7D%5E2+%281-e%5E%7B-T%7D+z%5E%7B-1%7D%29%7D&bg=ffffff&fg=192930&s=0&c=20201002)
De la ecuación del problema, se observa que 
![\displaystyle \mathcal{Z} \left[ G(s) \right] = K (1-z^{-1}) \cdot \frac{(1 - 1 + e^{-1}) z^{-1} + (1 - e^{-1} - e^{-1}) z^{-2}}{{(1 - z^{-1})}^2 (1 - e^{-1} z^{-1})}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cmathcal%7BZ%7D+%5Cleft%5B+G%28s%29+%5Cright%5D+%3D+K+%281-z%5E%7B-1%7D%29+%5Ccdot+%5Cfrac%7B%281+-+1+%2B+e%5E%7B-1%7D%29+z%5E%7B-1%7D+%2B+%281+-+e%5E%7B-1%7D+-+e%5E%7B-1%7D%29+z%5E%7B-2%7D%7D%7B%7B%281+-+z%5E%7B-1%7D%29%7D%5E2+%281+-+e%5E%7B-1%7D+z%5E%7B-1%7D%29%7D&bg=ffffff&fg=192930&s=0&c=20201002)

![\displaystyle G(z) = K (1-z^{-1}) \left[ \frac{e^{-1} z^{-1} + (1-2e^{-1}) z^{-2}}{ {(1-z^{-1})}^{2} (1 - e^{-1} z^{-1})} \right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+G%28z%29+%3D+K+%281-z%5E%7B-1%7D%29+%5Cleft%5B+%5Cfrac%7Be%5E%7B-1%7D+z%5E%7B-1%7D+%2B+%281-2e%5E%7B-1%7D%29+z%5E%7B-2%7D%7D%7B+%7B%281-z%5E%7B-1%7D%29%7D%5E%7B2%7D+%281+-+e%5E%7B-1%7D+z%5E%7B-1%7D%29%7D+%5Cright%5D&bg=ffffff&fg=192930&s=0&c=20201002)
![\displaystyle G(z) = K \left[ \frac{e^{-1} z^{-1} + (1-2e^{-1}) z^{-2}}{(1-z^{-1}) \cdot (1 - e^{-1} z^{-1})} \right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+G%28z%29+%3D+K+%5Cleft%5B+%5Cfrac%7Be%5E%7B-1%7D+z%5E%7B-1%7D+%2B+%281-2e%5E%7B-1%7D%29+z%5E%7B-2%7D%7D%7B%281-z%5E%7B-1%7D%29+%5Ccdot+%281+-+e%5E%7B-1%7D+z%5E%7B-1%7D%29%7D+%5Cright%5D&bg=ffffff&fg=192930&s=0&c=20201002)
Cambiando el término 
![\displaystyle G(z) = K \left[ \frac{e^{-1} z + (1-2e^{-1})}{(z-1)(z - e^{-1})} \right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+G%28z%29+%3D+K+%5Cleft%5B+%5Cfrac%7Be%5E%7B-1%7D+z+%2B+%281-2e%5E%7B-1%7D%29%7D%7B%28z-1%29%28z+-+e%5E%7B-1%7D%29%7D+%5Cright%5D&bg=ffffff&fg=192930&s=0&c=20201002)
Si 

Al estudiar la ecuación característica






![\displaystyle e^{-1} z + (1-2e^{-1}) = - \left[z^2 - (1+e^{-1})z + e^{-1} \right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+e%5E%7B-1%7D+z+%2B+%281-2e%5E%7B-1%7D%29+%3D+-+%5Cleft%5Bz%5E2+-+%281%2Be%5E%7B-1%7D%29z+%2B+e%5E%7B-1%7D+%5Cright%5D&bg=ffffff&fg=192930&s=0&c=20201002)
![\displaystyle e^{-1} z + (1-2e^{-1}) + \left[ z^2 - (1+e^{-1}) z + e^{-1} \right]=0](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+e%5E%7B-1%7D+z+%2B+%281-2e%5E%7B-1%7D%29+%2B+%5Cleft%5B+z%5E2+-+%281%2Be%5E%7B-1%7D%29+z+%2B+e%5E%7B-1%7D+%5Cright%5D%3D0&bg=ffffff&fg=192930&s=0&c=20201002)




Resolviendo esta última ecuación por fórmula general


Sus soluciones son


Hallando sus magnitudes


Como los valores de 


Finalmente, se concluye que el sistema es estable.
